Decolagem vertical elétrica pura e pouso UAV-p4
Nossos engenheiros aplicaram projetos aerodinâmicos avançados e designs industriais arrojados, incluindo a cauda invertida fixada na aeronave como trem de pouso, que equilibra o peso da aeronave e garante um voo estável sob carga máxima; A fuselagem estratificada da Série P minimiza o arrasto aerodinâmico e aumenta drasticamente a velocidade de cruzeiro, elevando a relação sustentação-arrasto para 21 (em comparação com 18 em um Boeing 747).
- em formação
UAV de decolagem e pouso vertical elétrico puro
Introdução
Tecnologia aerodinâmica líder com
Excelente relação sustentação-arrasto
Nossos engenheiros aplicaram projetos aerodinâmicos avançados e designs industriais arrojados, incluindo a cauda invertida fixada na aeronave como trem de pouso, que equilibra o peso da aeronave e garante um voo estável sob carga máxima; A fuselagem estratificada do P-Series minimiza o arrasto aerodinâmico e aumenta drasticamente a velocidade de cruzeiro, elevando a relação sustentação-arrasto para 21 (em comparação com 18 em um Boeing 747).
Construção leve, força pesada
Com melhor estrutura e design aerodinâmico, os UAVs da Série P apresentam excelente desempenho de resistência ao vento, podendo suportar cargas de até 6 g após testes de laboratório; A carga útil e a capacidade de resistência do UAV elétrico puro da classe de 15 kg são as mais altas.
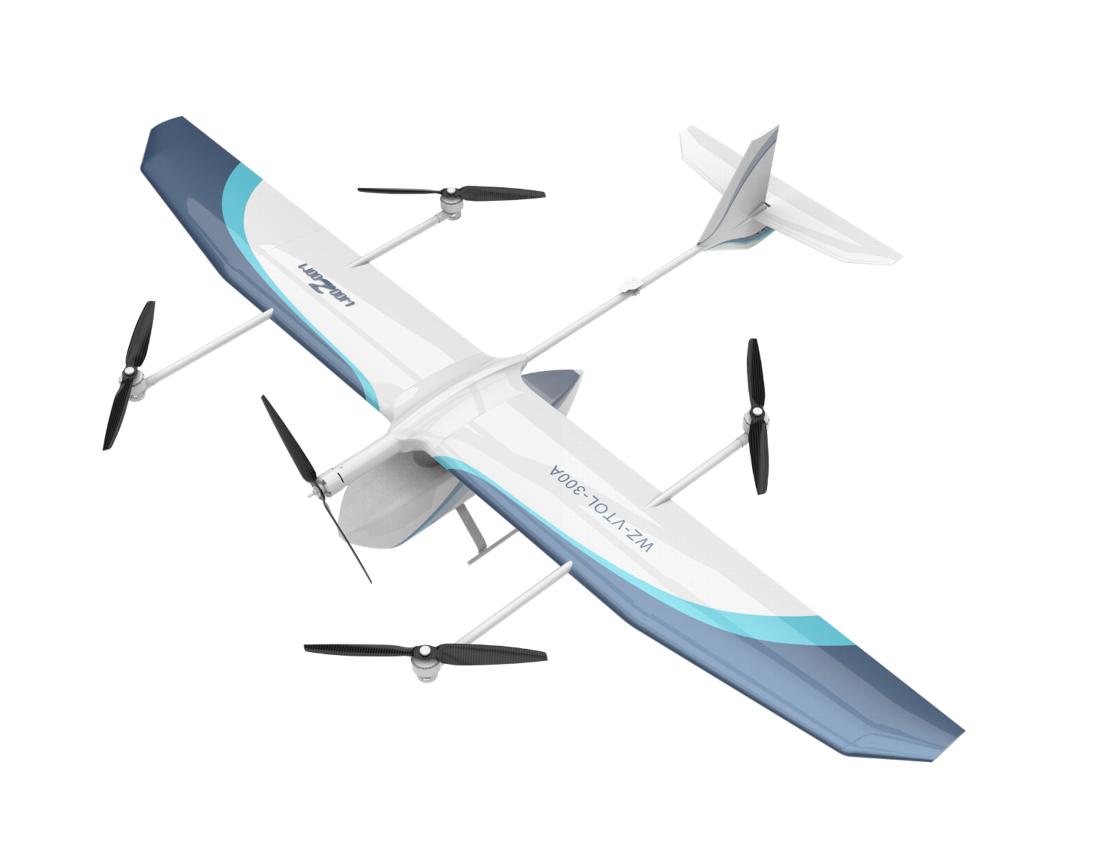
Uma variedade de cargas, você pode escolher
Os módulos de carga útil que fornecemos foram reprojetados para permitir a remontagem rápida para atender a diferentes requisitos. Existem pods fotoelétricos, câmeras ortográficas, câmeras de inclinação, câmeras multiespectrais e lidar.
parâmetro
4Tempo efetivo de navegação (montagem de 1Kg)
300kmAlcance máximo
100kmDistância máxima de transmissão de dados (30/60 opcional)
7500m Teto prático
6kgCarga máxima
Envergadura | ≤3m |
capitão | ≤ 1,9 m |
altura | ≤ 0,4 m |
Modo de decolagem e pouso | Decolagem e pouso verticais autônomos sem controle remoto |
Tirar peso | 15kg ou menos |
Hora do voo | ≥ 4,5 h (carregando 1kg de carga)/ ≥ 1,5 h (carregando Lidar) |
Velocidade de cruzeiro | 65km/h -150km/h |
Altura prática do teto | ≥ 7500m acima do nível do mar |
Resistência ao vento | Estágio de pouso do rotor 6, estágio de cruzeiro 8 contra o vento, 6 vento cruzado |
Temperatura de operação | 20℃ abaixo de zero a 50℃ acima de zero |
Tempo de resposta da tarefa | Desdobrar ≤3 min, retirar ≤3 min |
Módulo de carga | Tipo de mapeamento módulo de levantamento aéreo/módulo de inclinação/módulo de sensoriamento remoto Lidar/multi-luz Módulo de espectro, tipo de segurança suporta luz única/luz dupla/troca de três luzes |
controle de navegação | Sistema de navegação de dupla frequência, compatível com GPS/Beidou/GLONASS |
Sensor de atitude | Nada menos que 3 canais de design de sensor redundante |
modo de tarefa | O modo de tarefa totalmente automático é suportado |
Mecanismo de segurança | Suporta retorno de vento anormal, pairar de redução de perda de GPS, retorno automático de contato perdido,Função de suporte ao cálculo automático de energia |

NETD é a diferença de temperatura equivalente ao ruído da câmera infravermelha, que é um dos principais indicadores dos detectores infravermelhos. O NETD é um índice de avaliação objetivo para a sensibilidade de um sistema de imagem térmica e pode ser usado para prever a distância de detecção de um pequeno alvo de ponto de diferença de temperatura. O valor NETD da câmera infravermel...more